Single-View and Multi-View 3D Reconstructions
These reconstructions are obtained from one or more images in which
some 2D points are identified by hand and some a-priori geometric
information, such a known planarities, angles, symmetries and other
forms of regularity. From this information, the least-squares
reconstructions are computed, together with estimates of the precision
with which they are obtained.
A brief summary of each dataset is given. The maximum likelihood
reconstruction -assuming the errors in the 2D observations are
Gaussian- is given in the form of a VRML model. The images come mostly
from scanned postcards.
Full description of how the reconstruction is obtained can be found
in my PhD
thesis [4], (123 pages, ~2MB), our
2005 article [5] in
Computer Graphics and Image Understanding ,or
from two smaller articles that discuss
geometric aspects [1], (449KB)
and
probabilistic aspects [3]
(600KB). See also this smaller
tutorial [2] on
geometric aspects of single-view reconstruction
 |
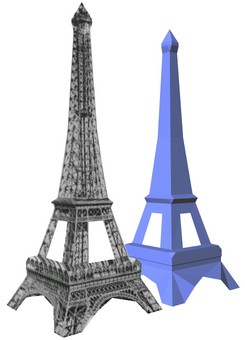 |
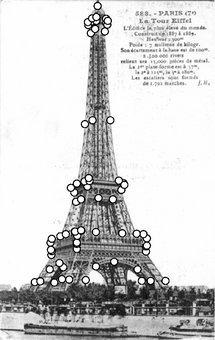
Eiffel Tower
The rightmost image shows the reconstruction with and without texture.
- Number of points : 70.
- Geometric information : 56 planarities and 45 known
ratios of signed lengths that express the symmetry of the tower.
- Estimated precision of reconstructed 3D points : 0.5%.
- VRML model. The
hidden side of the 3D object is completed by symmetry.
|
 |
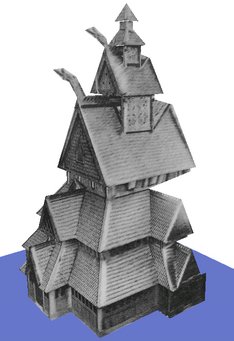 |
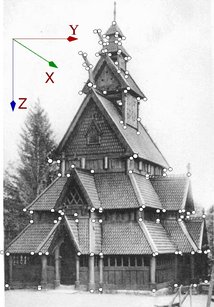
Folkemuseum
The rightmost image shows the reconstruction.
- Number of points : 131.
- Geometric information : 75 planes and 26 known ratios of
signed lengths.
- Estimated precision of reconstructed 3D points : 1.5%.
- VRML model.
|
 |
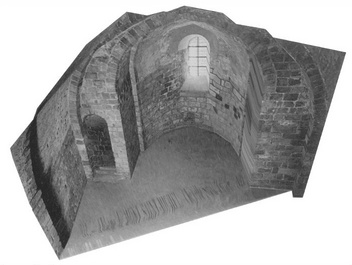 |
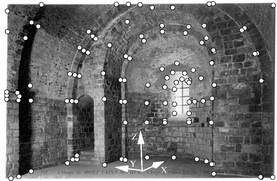
Saint-Michel
The rightmost image shows the reconstruction.
- Number of points : 114.
- Geometric information : 39 planes.
- Estimated precision of reconstructed 3D points : 5.5%.
- VRML model.
|
|
|
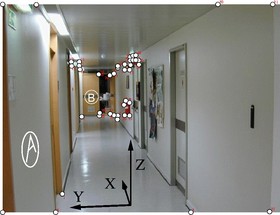
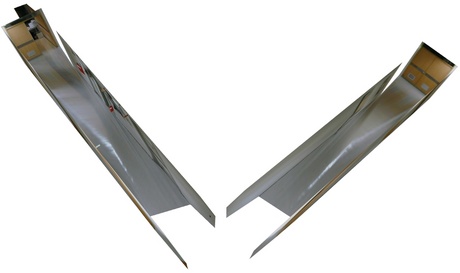
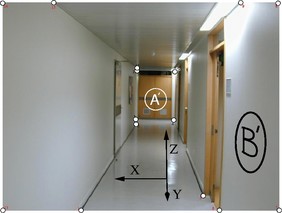
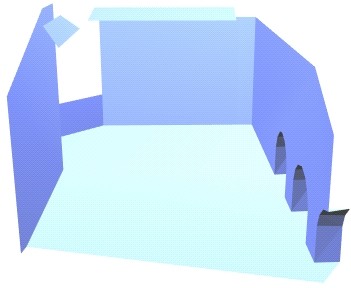
Hall
The two original images at the left and the reconstruction on the
right.
- Number of points : 61, with 46 in the first image and 15
in the second - there is no overlap.
- Geometric information : 35 planes and one knows the two
branches of the hall have equal length.
- Estimated precision of reconstructed 3D points : 3%.
- VRML model.
|
|
|
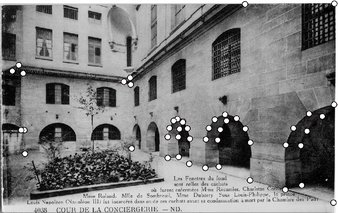
Conciergerie
The two original images at the left and the reconstruction on the
right.
- Number of points : 72, 24 in the first image, 48 in the
second, with 8 points visible in both images.
- Geometric information : 21 planes and two known ratios of
distances.
- Estimated precision of reconstructed 3D points : 2.1%.
- VRML model.
|
| [1] |
Etienne Grossmann, Diego Ortin, and José
Santos-Victor. Single
and multi-view reconstruction of structured scenes. In Proc. ACCV,
pages 228-234, 2002.
[ bib | .pdf
] |
| [2] |
Etienne Grossmann and José Santos-Victor. Using
geometric cues
for 3d reconstruction from a single view. CVOnline, 2002.
[ bib
| .pdf
] |
| [3]
|
Etienne Grossmann and José Santos-Victor. Maximum
likelihood 3d
reconstruction from one or more images under geometric constraints. In Proc.
BMVC, pages 343-352, 2002.
[ bib
| .pdf
] |
| [4] |
Etienne Grossmann. Maximum Likelihood 3D Reconstruction
From One or
More Uncalibrated Views Under Geometric Constraints. PhD thesis,
Universidade Técnica de Lisboa - Instituto Superior
Técnico, 2002.
[ bib | .pdf
] |
| [5] |
E. Grossmann and J. Santos-Victor. Least-squares 3D
reconstruction from one or more views and geometric clues.
Computer Vision and Image Understanding, 99:151-175, 2005.
[ bib | .pdf
] |
This bibliography was generated by
bibtex2html
1.52